I am a Ph.D. candidate studying Riemannian geometry. My advisor is Professor Wolfgang Ziller
Research
My thesis is on the subject of Riemannian manifolds with certain curvature conditions. My main work is on classifying 3 dimensional manifolds whose Ricci tensor has eigenvalues -1, -1, 0, which turns out to be the only non-trivial case where the eigenvalues are constants λ, λ, 0. I also study manifolds whose curvature tensor has large kernel, called conullity 2 or conullity 3 manifolds.Teaching
I am currently teaching Math 240 for the summer 2018 session 1. My office hours directly after the class at 3. See the course Canvas page for course information.Instructor
- Math 240 - Differential Equations and Linear Algebra - Summer 2018
- Math 240 - Differential Equations and Linear Algebra - Summer 2016
TA
- Math 371 - Algebra II - Spring 2018
- Math 240 - Differential Equations and Linear Algebra - Fall 2015
- Math 240 - Differential Equations and Linear Algebra - Spring 2015
- Math 110 - Calculus for Wharton Students - Fall 2014
Fun
These are some fun tidbits related to my research topic.Hyperbolic Space
Watch this New York Times video showing an introduction to the main space that I study! They focus on a space which is hyperbolic in two dimensions and Euclidean in one - that's what it means to have Ricci eigenvalues -1, -1, 0. However, they show only the simplest possible such space. I study spaces that curve in the same way, but the Euclidean direction can rotate from point to point. If you watch this with on a phone, you can look around by moving your phone.
Geodesic Foliations
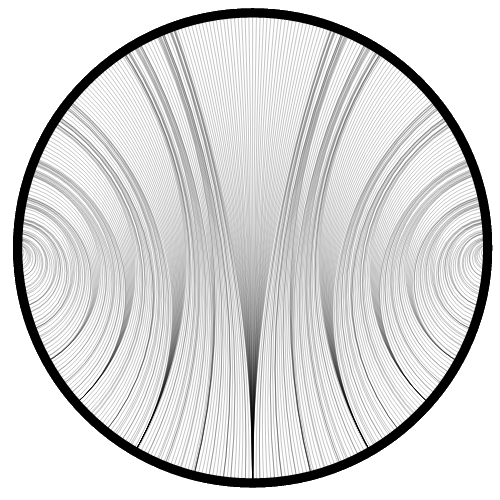
How many ways can you fill up the plane with straight lines that don't intersect? There's only one way to do this, up to rotations, since all the lines need to be parallel. What if we ask the same question instead about the hyperbolic plane? It turns out that there are many ways to do this! Importantly, for my research, there are ways to do this that aren't smooth. The image on the right shows one such way that is non-smooth in many places. It shows the Poincaré disk model of the hyperbolic plane and in this model the geodesics (which are analogous to straight lines in the plane) are circular arcs that meet the boundary of the disk at perpendicular angles.
Since geodesics bend away from each other in hyperbolic space, its easy for them to not intersect, but the opposite happens to geodesics on the sphere. In fact, there's no way to do this at all on a sphere! There, the geodesics are great circles, like the lines of longtidue of the Earth. But any two great circles intersect in two points, like how the lines of longitude intersect at the North and South poles. This demonstrates the difference between positive curvature (the sphere), zero curvature (the plane) and negative curvature (the hyperbolic plane).
You might wonder how non-smooth it's possible to make this on the hyperbolic plane. The answer is: it always has to be Lipschitz. This is a fairly mild way to be non-smooth, but it's enough to allow weird pictures like this one. You can see that it must be Lipschitz by looking at the angle of parallelism which limits how much you can tilt one geodesic before it bumps into another one.